
上两节,我们依次讲了树、二叉树、二叉查找树。二叉查找树是最常用的一种二叉树,它支持快速插入、删除、查找操作,各个操作的时间复杂度跟树的高度成正比,理想情况下,时间复杂度是 O(logn)。
不过,二叉查找树在频繁的动态更新过程中,可能会出现树的高度远大于 log2n 的情况,从而导致各个操作的效率下降。极端情况下,二叉树会退化为链表,时间复杂度会退化到 O(n)。我上一节说了,要解决这个复杂度退化的问题,我们需要设计一种平衡二叉查找树,也就是今天要讲的这种数据结构。
很多书籍里,但凡讲到平衡二叉查找树,就会拿红黑树作为例子。不仅如此,如果你有一定的开发经验,你会发现,在工程中,很多用到平衡二叉查找树的地方都会用红黑树。你有没有想过,为什么工程中都喜欢用红黑树,而不是其他平衡二叉查找树呢?
什么是“平衡二叉查找树”?
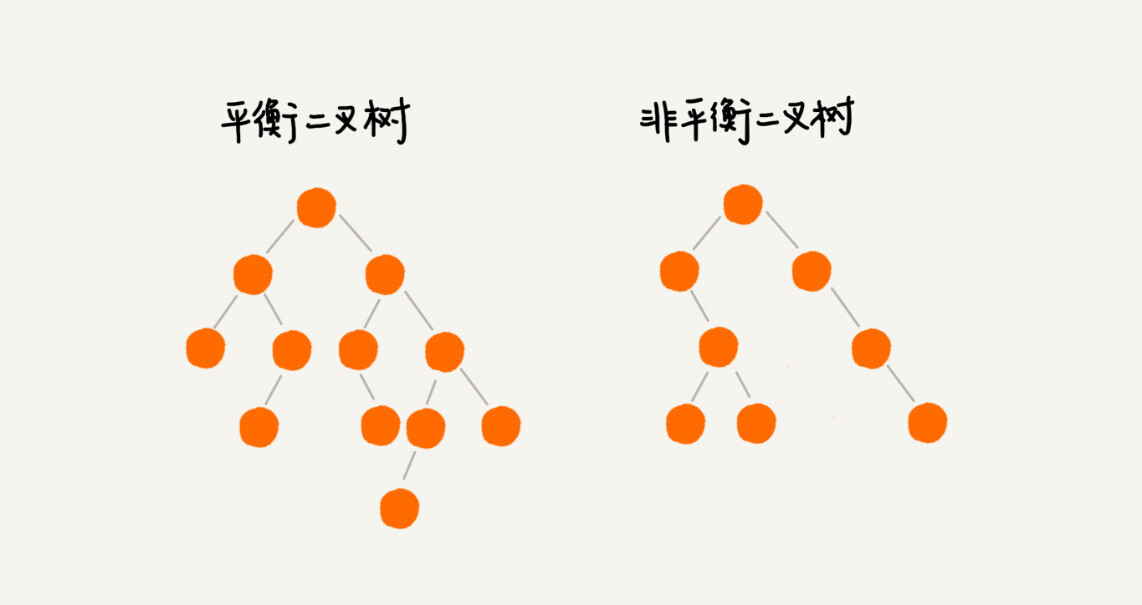
平衡二叉树的严格定义是这样的:二叉树中任意一个节点的左右子树的高度相差不能大于 1。从这个定义来看,上一节我们讲的完全二叉树、满二叉树其实都是平衡二叉树,但是非完全二叉树也有可能是平衡二叉树。
平衡二叉查找树不仅满足上面平衡二叉树的定义,还满足二叉查找树的特点。最先被发明的平衡二叉查找树是AVL 树,它严格符合我刚讲到的平衡二叉查找树的定义,即任何节点的左右子树高度相差不超过 1,是一种高度平衡的二叉查找树。
是很多平衡二叉查找树其实并没有严格符合上面的定义(树中任意一个节点的左右子树的高度相差不能大于 1),比如我们下面要讲的红黑树,它从根节点到各个叶子节点的最长路径,有可能会比最短路径大一倍。
我们学习数据结构和算法是为了应用到实际的开发中的,所以,我觉得没必去死抠定义。对于平衡二叉查找树这个概念,我觉得我们要从这个数据结构的由来,去理解“平衡”的意思。
发明平衡二叉查找树这类数据结构的初衷是,解决普通二叉查找树在频繁的插入、删除等动态更新的情况下,出现时间复杂度退化的问题。
所以,平衡二叉查找树中“平衡”的意思,其实就是让整棵树左右看起来比较“对称”、比较“平衡”,不要出现左子树很高、右子树很矮的情况。这样就能让整棵树的高度相对来说低一些,相应的插入、删除、查找等操作的效率高一些。
所以,如果我们现在设计一个新的平衡二叉查找树,只要树的高度不比 log2n 大很多(比如树的高度仍然是对数量级的),尽管它不符合我们前面讲的严格的平衡二叉查找树的定义,但我们仍然可以说,这是一个合格的平衡二叉查找树。
如何定义一棵“红黑树”?
平衡二叉查找树其实有很多,比如,Splay Tree(伸展树)、Treap(树堆)等,但是我们提到平衡二叉查找树,听到的基本都是红黑树。它的出镜率甚至要高于“平衡二叉查找树”这几个字,有时候,我们甚至默认平衡二叉查找树就是红黑树,那我们现在就来看看这个“明星树”。
红黑树的英文是“Red-Black Tree”,简称 R-B Tree。它是一种不严格的平衡二叉查找树,我前面说了,它的定义是不严格符合平衡二叉查找树的定义的。那红黑树究竟是怎么定义的呢?
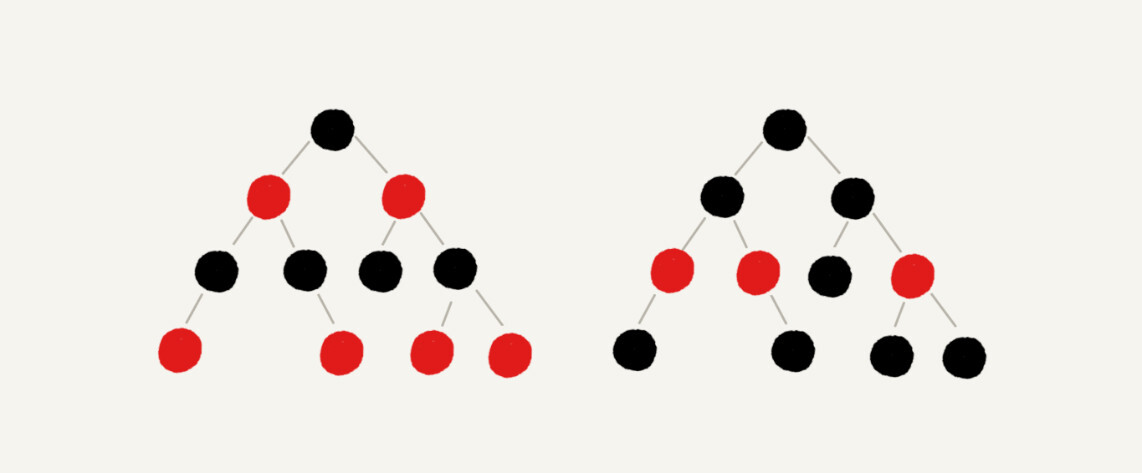
顾名思义,红黑树中的节点,一类被标记为黑色,一类被标记为红色。除此之外,一棵红黑树还需要满足这样几个要求:
- 根节点是黑色的;
- 每个叶子节点都是黑色的空节点(NIL),也就是说,叶子节点不存储数据;
- 任何相邻的节点都不能同时为红色,也就是说,红色节点是被黑色节点隔开的;
- 每个节点,从该节点到达其可达叶子节点的所有路径,都包含相同数目的黑色节点;
这里的第二点要求“叶子节点都是黑色的空节点”,稍微有些奇怪,它主要是为了简化红黑树的代码实现而设置的,下一节我们讲红黑树的实现的时候会讲到。这节我们暂时不考虑这一点,所以,在画图和讲解的时候,我将黑色的、空的叶子节点都省略掉了。
为了让你更好地理解上面的定义,我画了两个红黑树的图例,你可以对照着看下。
为什么说红黑树是“近似平衡”的?
我们前面也讲到,平衡二叉查找树的初衷,是为了解决二叉查找树因为动态更新导致的性能退化问题。所以,“平衡”的意思可以等价为性能不退化。“近似平衡”就等价为性能不会退化的太严重。
我们在上一节讲过,二叉查找树很多操作的性能都跟树的高度成正比。一棵极其平衡的二叉树(满二叉树或完全二叉树)的高度大约是 log2n,所以如果要证明红黑树是近似平衡的,我们只需要分析,红黑树的高度是否比较稳定地趋近 log2n 就好了。
红黑树的高度不是很好分析,我带你一步一步来推导。
首先,我们来看,如果我们将红色节点从红黑树中去掉,那单纯包含黑色节点的红黑树的高度是多少呢?
红色节点删除之后,有些节点就没有父节点了,它们会直接拿这些节点的祖父节点(父节点的父节点)作为父节点。所以,之前的二叉树就变成了四叉树。
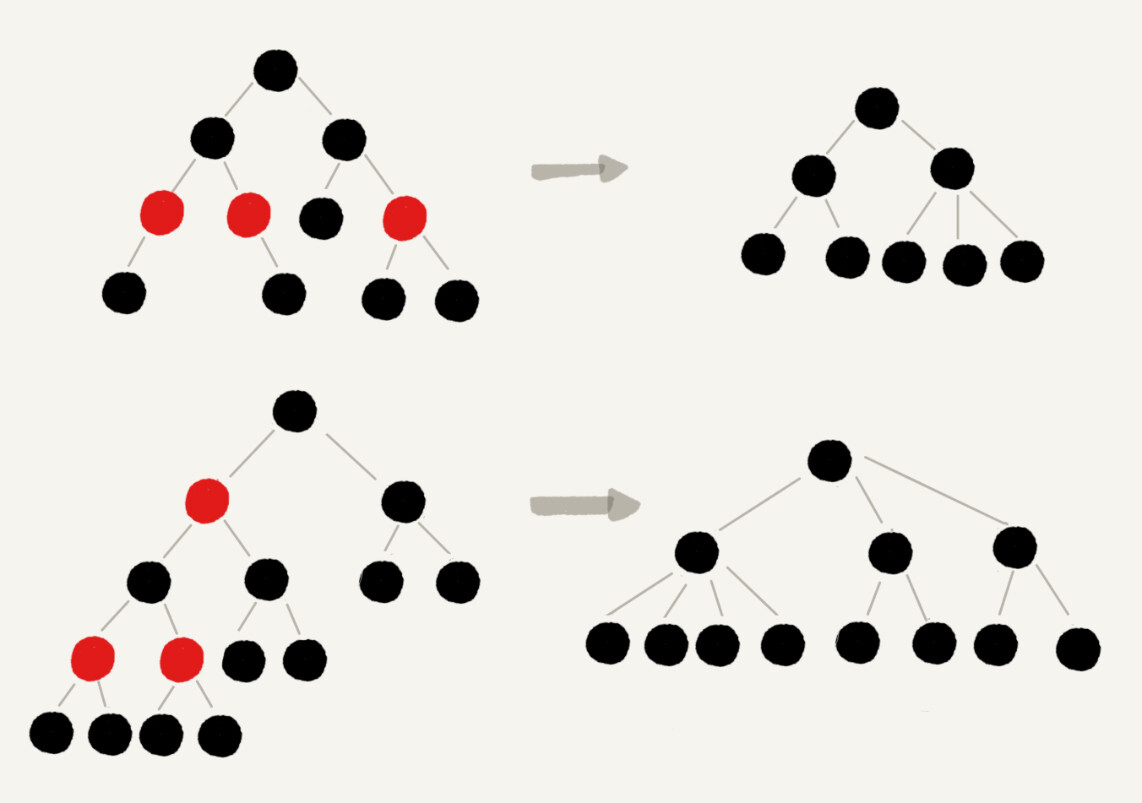
前面红黑树的定义里有这么一条:从任意节点到可达的叶子节点的每个路径包含相同数目的黑色节点。我们从四叉树中取出某些节点,放到叶节点位置,四叉树就变成了完全二叉树。所以,仅包含黑色节点的四叉树的高度,比包含相同节点个数的完全二叉树的高度还要小。
上一节我们说,完全二叉树的高度近似 log2n,这里的四叉“黑树”的高度要低于完全二叉树,所以去掉红色节点的“黑树”的高度也不会超过 log2n。
我们现在知道只包含黑色节点的“黑树”的高度,那我们现在把红色节点加回去,高度会变成多少呢?
从上面我画的红黑树的例子和定义看,在红黑树中,红色节点不能相邻,也就是说,有一个红色节点就要至少有一个黑色节点,将它跟其他红色节点隔开。红黑树中包含最多黑色节点的路径不会超过 log2n,所以加入红色节点之后,最长路径不会超过 2log2n,也就是说,红黑树的高度近似 2log2n。
所以,红黑树的高度只比高度平衡的 AVL 树的高度(log2n)仅仅大了一倍,在性能上,下降得并不多。这样推导出来的结果不够精确,实际上红黑树的性能更好。
解答开篇
我们刚刚提到了很多平衡二叉查找树,现在我们就来看下,为什么在工程中大家都喜欢用红黑树这种平衡二叉查找树?
我们前面提到 Treap、Splay Tree,绝大部分情况下,它们操作的效率都很高,但是也无法避免极端情况下时间复杂度的退化。尽管这种情况出现的概率不大,但是对于单次操作时间非常敏感的场景来说,它们并不适用。
AVL 树是一种高度平衡的二叉树,所以查找的效率非常高,但是,有利就有弊,AVL 树为了维持这种高度的平衡,就要付出更多的代价。每次插入、删除都要做调整,就比较复杂、耗时。所以,对于有频繁的插入、删除操作的数据集合,使用 AVL 树的代价就有点高了。
红黑树只是做到了近似平衡,并不是严格的平衡,所以在维护平衡的成本上,要比 AVL 树要低。
所以,红黑树的插入、删除、查找各种操作性能都比较稳定。对于工程应用来说,要面对各种异常情况,为了支撑这种工业级的应用,我们更倾向于这种性能稳定的平衡二叉查找树。
内容小结
很多同学都觉得红黑树很难,的确,它算是最难掌握的一种数据结构。其实红黑树最难的地方是它的实现,我们今天还没有涉及,下一节我会专门来讲。
不过呢,我认为,我们其实不应该把学习的侧重点,放到它的实现上。那你可能要问了,关于红黑树,我们究竟需要掌握哪些东西呢?
还记得我多次说过的观点吗?我们学习数据结构和算法,要学习它的由来、特性、适用的场景以及它能解决的问题。对于红黑树,也不例外。你如果能搞懂这几个问题,其实就已经足够了。
红黑树是一种平衡二叉查找树。它是为了解决普通二叉查找树在数据更新的过程中,复杂度退化的问题而产生的。红黑树的高度近似 log2n,所以它是近似平衡,插入、删除、查找操作的时间复杂度都是 O(logn)。
因为红黑树是一种性能非常稳定的二叉查找树,所以,在工程中,但凡是用到动态插入、删除、查找数据的场景,都可以用到它。不过,它实现起来比较复杂,如果自己写代码实现,难度会有些高,这个时候,我们其实更倾向用跳表来替代它。


