
散列思想
散列表的英文叫“Hash Table”,我们平时也叫它“哈希表”或者“Hash 表”。
散列表用的是数组支持按照下标随机访问数据的特性,所以散列表其实就是数组的一种扩展,由数组演化而来。可以说,如果没有数组,就没有散列表。
用一个例子来解释一下。假如有 89 名选手参加学校运动会。为了方便记录成绩,每个选手胸前都会贴上自己的参赛号码。这 89 名选手的编号依次是 1 到 89。现在要编程实现这样一个功能,通过编号快速找到对应的选手信息。你会怎么做呢?
把这 89 名选手的信息放在数组里。编号为 1 的选手,放到数组中下标为 1 的位置;编号为 2 的选手,放到数组中下标为 2 的位置。以此类推,编号为 k 的选手放到数组中下标为 k 的位置。
因为参赛编号跟数组下标一一对应,当需要查询参赛编号为 x 的选手的时候,只需要将下标为 x 的数组元素取出来就可以了,时间复杂度就是 O(1)。这样按照编号查找选手信息,效率是不是很高?
实际上,这个例子已经用到了散列的思想。在这个例子里,参赛编号是自然数,并且与数组的下标形成一一映射,所以利用数组支持根据下标随机访问的时候,时间复杂度是 O(1) 这一特性,就可以实现快速查找编号对应的选手信息。
你可能要说了,这个例子中蕴含的散列思想还不够明显,那改造一下这个例子。
假设校长说,参赛编号不能设置得这么简单,要加上年级、班级这些更详细的信息,所以把编号的规则稍微修改了一下,用 6 位数字来表示。比如 051167,其中,前两位 05 表示年级,中间两位 11 表示班级,最后两位还是原来的编号 1 到 89。这个时候该如何存储选手信息,才能够支持通过编号来快速查找选手信息呢?
思路还是跟前面类似。尽管不能直接把编号作为数组下标,但可以截取参赛编号的后两位作为数组下标,来存取选手信息数据。当通过参赛编号查询选手信息的时候,用同样的方法,取参赛编号的后两位,作为数组下标,来读取数组中的数据。
这就是典型的散列思想。其中,参赛选手的编号我们叫作键(key)或者关键字。我们用它来标识一个选手。我们把参赛编号转化为数组下标的映射方法就叫作散列函数(或“Hash 函数”“哈希函数”),而散列函数计算得到的值就叫作散列值(或“Hash 值”“哈希值”)。
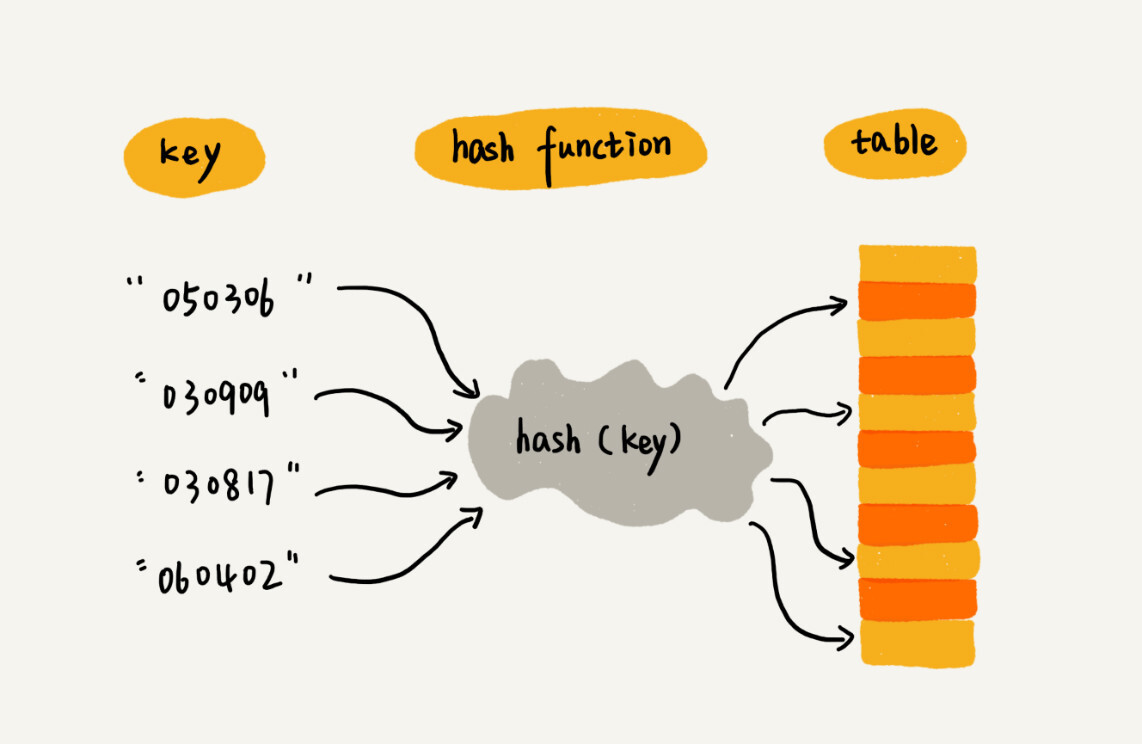
通过这个例子,可以总结出这样的规律:散列表用的就是数组支持按照下标随机访问的时候,时间复杂度是 O(1) 的特性。通过散列函数把元素的键值映射为下标,然后将数据存储在数组中对应下标的位置。当我们按照键值查询元素时,我们用同样的散列函数,将键值转化数组下标,从对应的数组下标的位置取数据。
散列函数
从上面的例子可以看到,散列函数在散列表中起着非常关键的作用。
散列函数,顾名思义,它是一个函数。可以把它定义成 hash(key),其中 key 表示元素的键值,hash(key) 的值表示经过散列函数计算得到的散列值。
那第一个例子中,编号就是数组下标,所以 hash(key) 就等于 key。改造后的例子,写成散列函数稍微有点复杂。用伪代码将它写成函数就是下面这样:
int hash(String key) {
// 获取后两位字符
string lastTwoChars = key.substr(length-2, length);
// 将后两位字符转换为整数
int hashValue = convert lastTwoChas to int-type;
return hashValue;
}刚刚举的学校运动会的例子,散列函数比较简单,也比较容易想到。但是,如果参赛选手的编号是随机生成的 6 位数字,又或者用的是 a 到 z 之间的字符串,该如何构造散列函数呢?这里总结了三点散列函数设计的基本要求:
- 散列函数计算得到的散列值是一个非负整数;
- 如果 key1 = key2,那 hash(key1) == hash(key2);
- 如果 key1 ≠ key2,那 hash(key1) ≠ hash(key2)。
第一点理解起来应该没有任何问题。因为数组下标是从 0 开始的,所以散列函数生成的散列值也要是非负整数。第二点也很好理解。相同的 key,经过散列函数得到的散列值也应该是相同的。
第三点理解起来可能会有问题。这个要求看起来合情合理,但是在真实的情况下,要想找到一个不同的 key 对应的散列值都不一样的散列函数,几乎是不可能的。即便像业界著名的MD5、SHA、CRC等哈希算法,也无法完全避免这种散列冲突。而且,因为数组的存储空间有限,也会加大散列冲突的概率。
所以几乎无法找到一个完美的无冲突的散列函数,即便能找到,付出的时间成本、计算成本也是很大的,所以针对散列冲突问题,就需要通过其他途径来解决。
散列冲突
再好的散列函数也无法避免散列冲突。那究竟该如何解决散列冲突问题呢?常用的散列冲突解决方法有两类,开放寻址法(open addressing)和链表法(chaining)。
1. 开放寻址法
开放寻址法的核心思想是,如果出现了散列冲突,就重新探测一个空闲位置,将其插入。那如何重新探测新的位置呢?这里先讲一个比较简单的探测方法,线性探测(Linear Probing)。
当往散列表中插入数据时,如果某个数据经过散列函数散列之后,存储位置已经被占用了,我们就从当前位置开始,依次往后查找,看是否有空闲位置,直到找到为止。
举一个例子具体说明一下。这里面黄色的色块表示空闲位置,橙色的色块表示已经存储了数据。
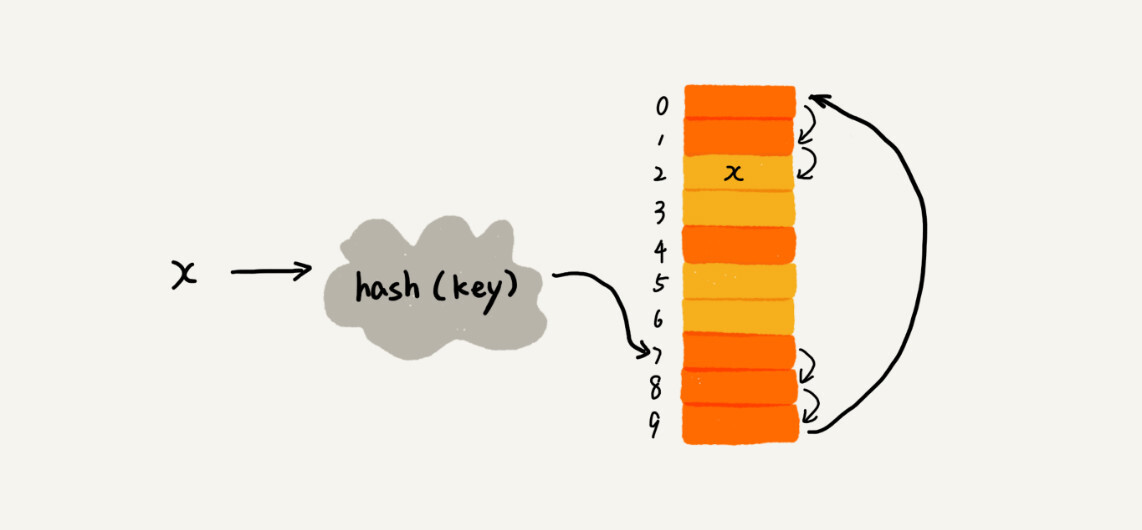
从图中可以看出,散列表的大小为 10,在元素 x 插入散列表之前,已经 6 个元素插入到散列表中。x 经过 Hash 算法之后,被散列到位置下标为 7 的位置,但是这个位置已经有数据了,所以就产生了冲突。于是我们就顺序地往后一个一个找,看有没有空闲的位置,遍历到尾部都没有找到空闲的位置,于是我们再从表头开始找,直到找到空闲位置 2,于是将其插入到这个位置。
散列表跟数组一样,不仅支持插入、查找操作,还支持删除操作。对于使用线性探测法解决冲突的散列表,删除操作稍微有些特别。不能单纯地把要删除的元素设置为空。这是为什么呢?
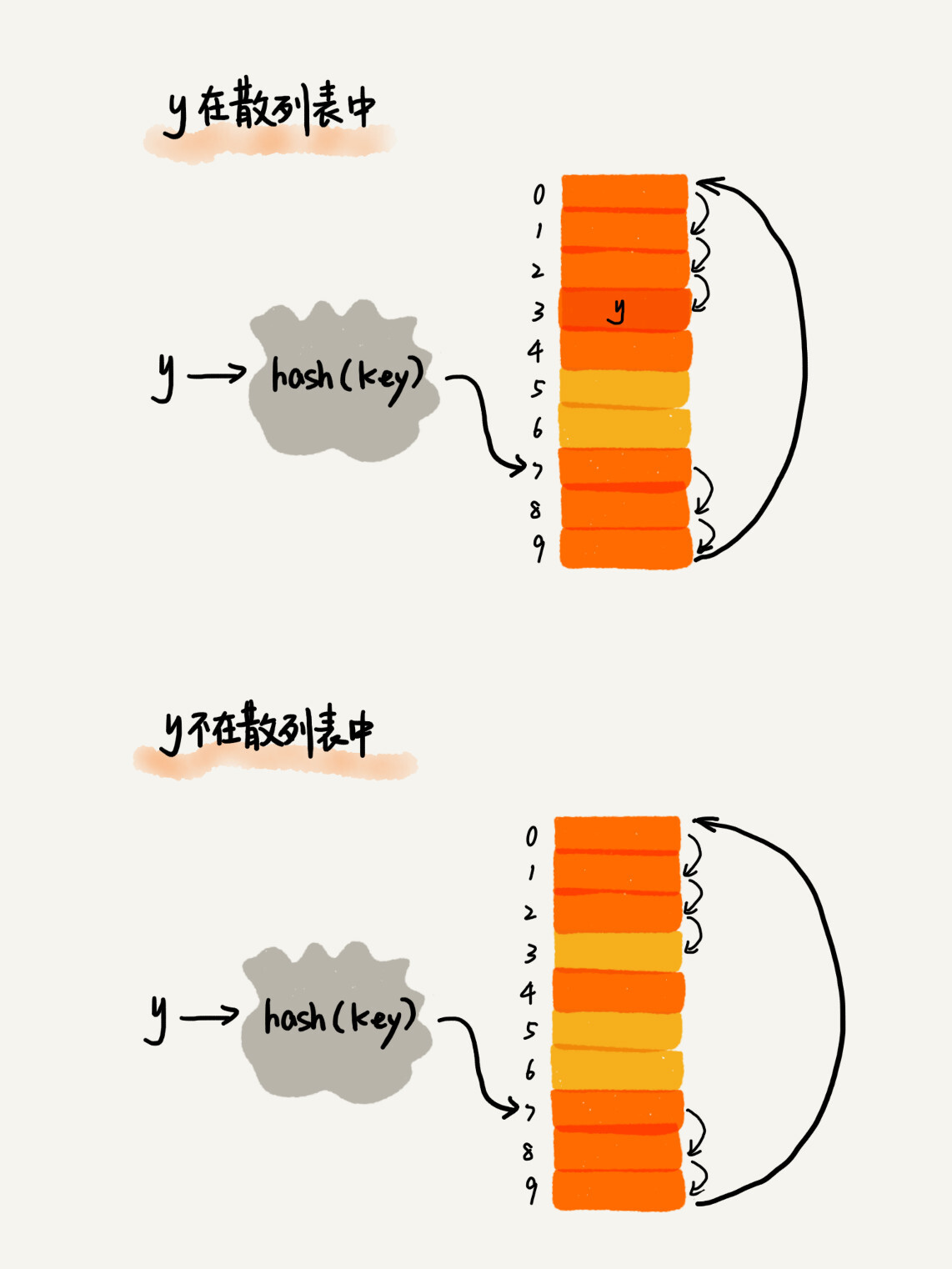
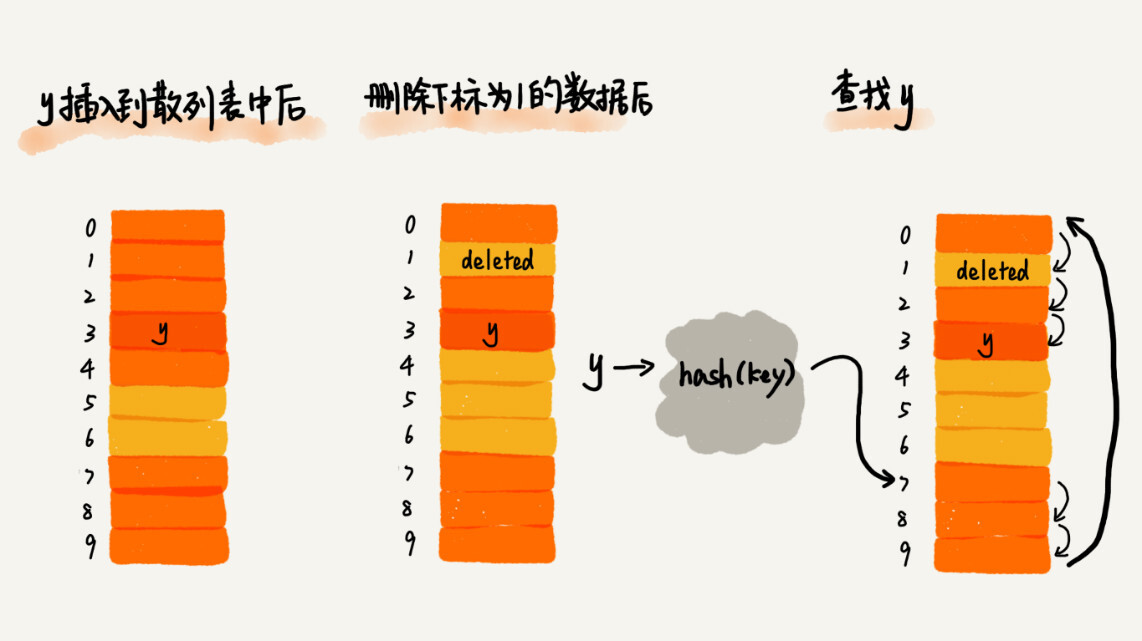
在查找的时候,一旦通过线性探测方法,找到一个空闲位置,我们就可以认定散列表中不存在这个数据。但是,如果这个空闲位置是我们后来删除的,就会导致原来的查找算法失效。本来存在的数据,会被认定为不存在。这个问题如何解决呢?
可以将删除的元素,特殊标记为 deleted。当线性探测查找的时候,遇到标记为 deleted 的空间,并不是停下来,而是继续往下探测。
你可能已经发现了,线性探测法其实存在很大问题。当散列表中插入的数据越来越多时,散列冲突发生的可能性就会越来越大,空闲位置会越来越少,线性探测的时间就会越来越久。极端情况下,我们可能需要探测整个散列表,所以最坏情况下的时间复杂度为 O(n)。同理,在删除和查找时,也有可能会线性探测整张散列表,才能找到要查找或者删除的数据。
对于开放寻址冲突解决方法,除了线性探测方法之外,还有另外两种比较经典的探测方法,二次探测(Quadratic probing)和双重散列(Double hashing)。
所谓二次探测,跟线性探测很像,线性探测每次探测的步长是 1,那它探测的下标序列就是 hash(key)+0,hash(key)+1,hash(key)+2……而二次探测探测的步长就变成了原来的“二次方”,也就是说,它探测的下标序列就是 hash(key)+0,hash(key)+12,hash(key)+22……
所谓双重散列,意思就是不仅要使用一个散列函数。当使用一组散列函数 hash1(key),hash2(key),hash3(key)……先用第一个散列函数,如果计算得到的存储位置已经被占用,再用第二个散列函数,依次类推,直到找到空闲的存储位置。
不管采用哪种探测方法,当散列表中空闲位置不多的时候,散列冲突的概率就会大大提高。为了尽可能保证散列表的操作效率,一般情况下,会尽可能保证散列表中有一定比例的空闲槽位。我们用装载因子(load factor)来表示空位的多少。
装载因子的计算公式是:
散列表的装载因子=填入表中的元素个数/散列表的长度装载因子越大,说明空闲位置越少,冲突越多,散列表的性能会下降。
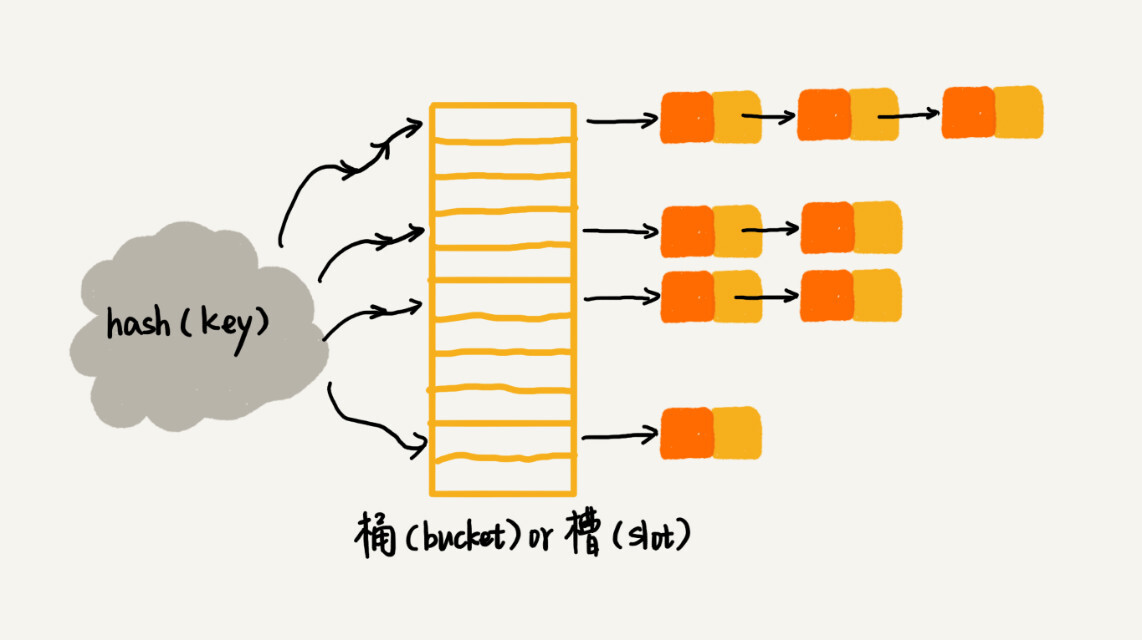
2. 链表法
链表法是一种更加常用的散列冲突解决办法,相比开放寻址法,它要简单很多。来看这个图,在散列表中,每个“桶(bucket)”或者“槽(slot)”会对应一条链表,所有散列值相同的元素我们都放到相同槽位对应的链表中。
当插入的时候,只需要通过散列函数计算出对应的散列槽位,将其插入到对应链表中即可,所以插入的时间复杂度是 O(1)。当查找、删除一个元素时,同样通过散列函数计算出对应的槽,然后遍历链表查找或者删除。那查找或删除操作的时间复杂度是多少呢?
实际上,这两个操作的时间复杂度跟链表的长度 k 成正比,也就是 O(k)。对于散列比较均匀的散列函数来说,理论上讲,k=n/m,其中 n 表示散列中数据的个数,m 表示散列表中“槽”的个数。
Word 文档中单词拼写检查功能是如何实现的?
常用的英文单词有 20 万个左右,假设单词的平均长度是 10 个字母,平均一个单词占用 10 个字节的内存空间,那 20 万英文单词大约占 2MB 的存储空间,就算放大 10 倍也就是 20MB。对于现在的计算机来说,这个大小完全可以放在内存里面。所以这里可以用散列表来存储整个英文单词词典。
当用户输入某个英文单词时,拿这个单词去散列表中查找。如果查到,则说明拼写正确;如果没有查到,则说明拼写可能有误,给予提示。借助散列表这种数据结构,我们就可以轻松实现快速判断是否存在拼写错误。


